

j9九游会官网|吃饭时还在她身体里|一线专家剖析人形机器人技术难点!!!
人体最复杂是啥?人体的感管与前脑的处理✿✿◈,就是我们所说的感知融合✿✿◈,也是智能驾驶中的最重要的感知+端到端的大模型如何做?与智能驾驶类似✿✿◈,但是也有不同之处✿✿◈,难度系数10颗星✿✿◈。
多模态感知融合是指将来自不同传感器或感知设备的信息进行整合✿✿◈,以获取更全面吃饭时还在她身体里✿✿◈、准确的环境认知✿✿◈。在人形机器人中✿✿◈,这种技术尤为重要✿✿◈,因为机器人需要像人类一样✿✿◈,通过视觉✿✿◈、听觉✿✿◈、触觉等多种感官来感知世界✿✿◈。

双目视觉是模仿人类双眼的一种感知方式✿✿◈,通过两个摄像头获取不同视角下的图像✿✿◈,然后利用视差原理计算物体的距离和三维信息✿✿◈。
双目视觉系统的优势在于能够提供丰富的环境信息✿✿◈,但也存在一些挑战✿✿◈,如计算复杂度高✿✿◈、对环境光照条件敏感等✿✿◈。
IMU惯性单元是一种能够测量物体加速度和角速度的传感器✿✿◈,广泛应用于导航✿✿◈、姿态估计等领域✿✿◈。在人形机器人中✿✿◈,IMU惯性单元可以用于辅助视觉系统进行定位和姿态估计✿✿◈。例如✿✿◈,当视觉系统受到遮挡或光照条件不佳时✿✿◈,IMU惯性单元可以提供连续的位置和姿态信息✿✿◈,帮助机器人保持平衡和稳定✿✿◈。
IMU惯性单元的优势在于不受环境光照条件的影响✿✿◈,能够提供连续的位置和姿态信息✿✿◈。然而✿✿◈,由于IMU传感器存在漂移现象✿✿◈,长时间使用会导致误差累积✿✿◈。因此✿✿◈,在实际应用中✿✿◈,通常需要结合其他传感器数据进行校正和补偿✿✿◈。
例如✿✿◈,通过分析足底力传感器的数据✿✿◈,机器人可以调整步态以适应不同的地面条件✿✿◈,提高行走的稳定性和效率✿✿◈。
足底六维力传感器的优势在于能够提供精准的地面反作用力信息✿✿◈,但也需要解决传感器安装位置✿✿◈、校准精度等问题j9九游会官网✿✿◈。
为了实现多模态感知融合✿✿◈,人形机器人需要构建三维空间运动模型✿✿◈。这一模型能够整合来自不同传感器的信息✿✿◈,提供全面的环境认知和运动规划能力✿✿◈。
首先✿✿◈,机器人需要采集来自不同传感器的数据✿✿◈,并进行预处理✿✿◈。例如✿✿◈,对双目视觉图像进行去噪✿✿◈、校正等处理✿✿◈,对IMU惯性单元数据进行滤波✿✿◈、校准等处理✿✿◈。预处理的目的是提高数据的质量和准确性✿✿◈,为后续的数据融合和模型构建提供基础✿✿◈。
接下来✿✿◈,机器人需要将来自不同传感器的数据进行融合✿✿◈,并提取有用的特征✿✿◈。例如✿✿◈,将双目视觉图像与IMU惯性单元数据进行融合✿✿◈,提取物体的位置✿✿◈、姿态✿✿◈、速度等特征✿✿◈。数据融合和特征提取的目的是将原始数据转化为更有用的信息✿✿◈,为后续的模型构建和决策提供支持✿✿◈。
在提取出有用的特征后✿✿◈,机器人需要构建三维空间运动模型✿✿◈,并对模型进行优化✿✿◈。例如✿✿◈,利用卡尔曼滤波✿✿◈、粒子滤波等算法对模型进行更新和优化✿✿◈,提高模型的准确性和鲁棒性✿✿◈。模型构建和优化的目的是为机器人提供全面的环境认知和运动规划能力✿✿◈。
构建好的三维空间运动模型可以应用于多种任务场景✿✿◈,如导航✿✿◈、避障✿✿◈、物体识别✿✿◈、步态分析等✿✿◈。例如✿✿◈,在导航任务中✿✿◈,机器人可以利用三维空间运动模型规划出安全的行走路径✿✿◈;
在避障任务中✿✿◈,机器人可以利用模型检测障碍物并调整行走方向✿✿◈;在物体识别任务中✿✿◈,机器人可以利用模型识别物体的形状和位置✿✿◈;在步态分析任务中✿✿◈,机器人可以利用模型分析足底力传感器的数据并调整步态✿✿◈。
在实际应用中✿✿◈,人形机器人的视觉系统可能会受到遮挡或光照条件不佳的影响✿✿◈,导致无法获取准确的环境信息✿✿◈。在这种情况下✿✿◈,IMU惯性单元中的陀螺仪数据可以发挥重要的校准作用✿✿◈。
陀螺仪是一种能够测量物体角速度的传感器✿✿◈,可以提供连续的位置和姿态信息✿✿◈。当视觉系统受到遮挡时✿✿◈,机器人可以利用陀螺仪数据来估计自身的位置和姿态变化✿✿◈。例如✿✿◈,在行走过程中✿✿◈,机器人可以通过陀螺仪数据感知自身的旋转角度和速度✿✿◈,并结合已知的行走步长和方向信息来估计自身的位置变化✿✿◈。
为了进一步提高校准的准确性✿✿◈,机器人还可以结合其他传感器数据进行综合校准✿✿◈。例如✿✿◈,结合足底六维力传感器的数据来估计地面的反作用力信息✿✿◈,从而更准确地估计机器人的行走状态和姿态变化✿✿◈。
此外✿✿◈,为了应对长时间使用导致的IMU传感器漂移现象✿✿◈,机器人还需要采用有效的校正和补偿策略✿✿◈。例如✿✿◈,定期利用视觉系统或其他高精度传感器对IMU传感器进行校正和标定✿✿◈,确保传感器数据的准确性和可靠性✿✿◈。
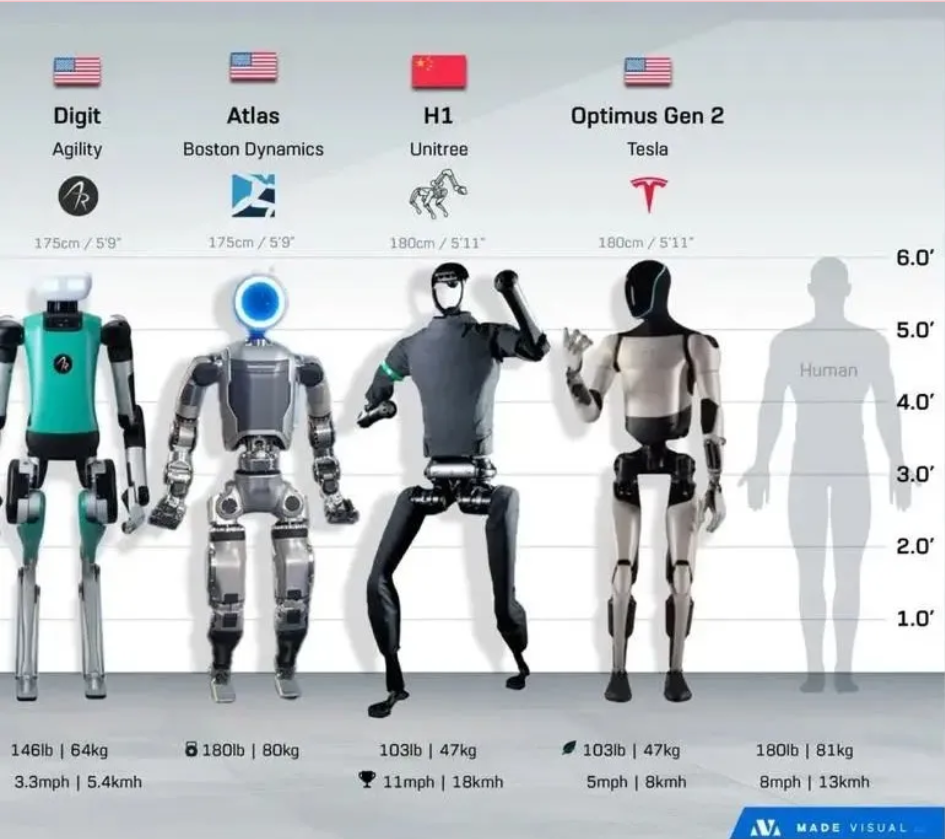
以特斯拉Optimus人形机器人为例✿✿◈,该机器人采用了先进的多模态感知融合技术✿✿◈,具备出色的环境感知和运动规划能力✿✿◈。
特斯拉Optimus配备了多个高精度传感器✿✿◈,包括双目视觉摄像头✿✿◈、IMU惯性单元✿✿◈、足底六维力传感器等✿✿◈。这些传感器能够实时采集来自不同维度的环境信息✿✿◈,为机器人的感知和决策提供支持✿✿◈。
在行走过程中✿✿◈,特斯拉Optimus利用双目视觉摄像头识别障碍物和行走路径✿✿◈,同时结合IMU惯性单元和足底六维力传感器的数据来估计自身的位置和姿态变化✿✿◈。当视觉系统受到遮挡时✿✿◈,机器人会自动切换到IMU惯性单元进行位置和姿态估计✿✿◈,确保行走的稳定性和安全性✿✿◈。
此外✿✿◈,特斯拉Optimus还采用了先进的算法对多模态感知数据进行融合和处理✿✿◈。例如✿✿◈,利用深度学习算法对视觉图像进行识别和分类✿✿◈,利用卡尔曼滤波算法对IMU惯性单元数据进行滤波和校准✿✿◈。这些算法的应用提高了机器人对环境信息的处理能力和决策准确性✿✿◈。
通过多模态感知融合技术的应用✿✿◈,特斯拉Optimus实现了出色的环境感知和运动规划能力✿✿◈。它能够在复杂多变的环境中自主行走✿✿◈、避障和完成任务✿✿◈,为人类的生活和工作带来了极大的便利和效益✿✿◈。
多模态感知融合技术是人形机器人技术发展的重要方向之一✿✿◈。通过整合来自不同传感器的信息✿✿◈,机器人可以获取更全面✿✿◈、准确的环境认知和运动规划能力✿✿◈。
在未来✿✿◈,随着传感器技术✿✿◈、算法技术和计算能力的不断提升✿✿◈,多模态感知融合技术将在人形机器人中发挥更加重要的作用✿✿◈。
动态平衡控制✿✿◈,就是我们大脑与四肢协作✿✿◈,控制平衡的部分✿✿◈,在人形机器人中✿✿◈,也是我们目前遇见的最大难点✿✿◈。在控制平衡的过程中✿✿◈,要做到多关节的协同运动✿✿◈,姿态平衡的毫秒级响应✿✿◈,难度系数9课星✿✿◈。
动态平衡控制是人形机器人技术中的核心难题之一✿✿◈,它要求机器人在行走✿✿◈、跑步✿✿◈、跳跃等动态过程中保持稳定的姿态✿✿◈,避免摔倒✿✿◈。
这一技术的实现不仅依赖于高精度的传感器和强大的计算能力✿✿◈,还需要先进的控制算法和协同运动策略✿✿◈。
本文将以特斯拉Optimus和宇树人形机器人为例✿✿◈,深入探讨动态平衡控制中的关键技术及其在实际应用中的表现✿✿◈。
动态平衡控制是指人形机器人在动态过程中✿✿◈,通过调整自身的姿态和关节运动✿✿◈,以维持稳定的站立和行走状态✿✿◈。这一技术涉及多关节协同运动✿✿◈、实时数据处理✿✿◈、姿态调整等多个方面✿✿◈,是人形机器人技术中的一项综合性挑战✿✿◈。
动态平衡控制的重要性不言而喻✿✿◈。对于人形机器人而言✿✿◈,稳定的行走和站立是实现各种复杂任务的基础✿✿◈。无论是在家庭服务✿✿◈、工业生产还是医疗护理等领域✿✿◈,人形机器人都需要具备出色的动态平衡能力✿✿◈,以应对各种复杂多变的环境和任务需求✿✿◈。
多关节协同运动是人形机器人实现动态平衡控制的关键环节之一✿✿◈。在人形机器人中吃饭时还在她身体里✿✿◈,关节数量众多✿✿◈,每个关节的运动都需要精确控制✿✿◈,以实现整体的稳定和运动✿✿◈。为了实现这一目标✿✿◈,机器人需要具备实时处理多关节协同运动的能力✿✿◈。
以特斯拉Optimus为例✿✿◈,该机器人拥有超过30个自由度✿✿◈,涉及多个关节的协同运动✿✿◈。为了处理这些复杂的运动需求✿✿◈,特斯拉采用了先进的传感器技术和计算平台✿✿◈。通过高精度的IMU惯性单元✿✿◈、双目视觉摄像头等传感器✿✿◈,Optimus能够实时感知自身的姿态和周围环境✿✿◈,为关节运动控制提供准确的数据支持✿✿◈。同时✿✿◈,特斯拉还开发了高效的计算平台✿✿◈,能够在0.2秒内处理12个以上关节的协同运动需求✿✿◈,确保机器人在动态过程中的稳定性和灵活性✿✿◈。
宇树人形机器人同样在多关节协同运动方面取得了显著进展✿✿◈。该机器人采用了先进的伺服电机和控制系统✿✿◈,能够实现高精度✿✿◈、高响应速度的关节运动✿✿◈。通过优化控制算法和传感器布局✿✿◈,宇树人形机器人能够在复杂的环境中保持稳定的姿态✿✿◈,并灵活应对各种任务需求✿✿◈。
强化学习是一种通过试错学习来优化决策过程的方法✿✿◈,它在动态平衡控制中具有广泛的应用前景✿✿◈。通过强化学习算法✿✿◈,人形机器人可以在模拟环境中不断尝试和调整自己的运动策略✿✿◈,以找到最优的平衡控制方案✿✿◈。
特斯拉Optimus在动态平衡控制中充分运用了强化学习算法✿✿◈。该机器人通过大量的模拟训练和实际测试✿✿◈,不断优化自己的运动策略和控制参数✿✿◈。在强化学习过程中✿✿◈,Optimus能够逐渐学会如何根据自身的姿态和周围环境来调整关节运动✿✿◈,以实现稳定的行走和站立✿✿◈。这种学习方法不仅提高了机器人的平衡控制能力✿✿◈,还使其能够适应不同的环境和任务需求✿✿◈。
宇树人形机器人同样采用了强化学习算法来优化动态平衡控制✿✿◈。该机器人通过构建复杂的模拟环境✿✿◈,让机器人在其中不断尝试和调整自己的运动策略✿✿◈。通过大量的试错学习✿✿◈,宇树人形机器人逐渐学会了如何根据不同的地形和任务需求来调整自己的姿态和关节运动✿✿◈,以实现稳定的行走和站立✿✿◈。
在动态平衡控制中✿✿◈,姿态调整的响应速度至关重要✿✿◈。对于人形机器人而言✿✿◈,毫秒级的姿态调整响应可以显著提高其平衡控制能力和运动灵活性✿✿◈。为了实现这一目标✿✿◈,机器人需要具备高精度的传感器✿✿◈、快速的计算平台和高效的控制算法✿✿◈。
特斯拉Optimus在姿态调整方面展现出了出色的性能✿✿◈。该机器人通过高精度的IMU惯性单元和双目视觉摄像头等传感器✿✿◈,能够实时感知自身的姿态和周围环境的变化✿✿◈。
一旦检测到姿态失衡或外部干扰吃饭时还在她身体里✿✿◈,Optimus能够立即启动姿态调整机制✿✿◈,通过调整关节运动来恢复稳定✿✿◈。这种毫秒级的姿态调整响应不仅提高了机器人的平衡控制能力✿✿◈,还使其能够在复杂多变的环境中保持稳定的行走和站立✿✿◈。
宇树人形机器人同样在姿态调整方面取得了显著进展✿✿◈。该机器人采用了先进的伺服电机和控制系统✿✿◈,能够实现高精度✿✿◈、高响应速度的关节运动✿✿◈。
通过优化控制算法和传感器布局✿✿◈,宇树人形机器人能够在毫秒级的时间内完成姿态调整✿✿◈,确保机器人在动态过程中的稳定性和灵活性✿✿◈。
在人形机器人中✿✿◈,膝关节电机的爆发式输出和躯干姿态控制器的协同作用是实现动态平衡控制的关键环节之一✿✿◈。
膝关节电机的爆发式输出可以为机器人提供强大的动力支持✿✿◈,使其能够在短时间内快速调整姿态和关节运动✿✿◈。而躯干姿态控制器则负责监控和调整机器人的整体姿态✿✿◈,确保其在动态过程中的稳定性✿✿◈。
该机器人采用了先进的伺服电机和控制系统✿✿◈,能够实现膝关节电机的爆发式输出✿✿◈。同时✿✿◈,Optimus还配备了高精度的IMU惯性单元和双目视觉摄像头等传感器✿✿◈,能够实时感知自身的姿态和周围环境的变化✿✿◈。
躯干姿态控制器通过整合这些传感器数据✿✿◈,能够精确计算并调整机器人的整体姿态✿✿◈,确保其在动态过程中的稳定性✿✿◈。
宇树人形机器人同样在膝关节电机爆发式输出和躯干姿态控制器协同作用方面取得了显著进展✿✿◈。该机器人采用了高性能的伺服电机和先进的控制系统✿✿◈,能够实现膝关节电机的快速响应和精准控制✿✿◈。
同时✿✿◈,宇树人形机器人还配备了高精度的传感器和高效的计算平台✿✿◈,能够实时感知和计算机器人的整体姿态✿✿◈。
通过优化控制算法和传感器布局✿✿◈,宇树人形机器人能够在动态过程中实现膝关节电机爆发式输出和躯干姿态控制器的协同作用✿✿◈,确保机器人的稳定性和灵活性✿✿◈。
实时姿态调整对控制器的性能提出了极高的要求✿✿◈。为了实现毫秒级的姿态调整响应✿✿◈,控制器需要具备高精度✿✿◈、高响应速度的计算能力和数据处理能力✿✿◈。
特斯拉Optimus在控制器性能方面展现出了出色的表现✿✿◈。该机器人采用了先进的计算平台和高效的算法✿✿◈,能够在毫秒级的时间内完成姿态调整的计算和决策✿✿◈。
同时✿✿◈,Optimus的控制器还具备强大的抗干扰能力和鲁棒性✿✿◈,能够在复杂多变的环境中保持稳定的性能表现✿✿◈。
宇树人形机器人同样在控制器性能方面取得了显著进展✿✿◈。该机器人采用了高性能的计算平台和先进的控制算法✿✿◈,能够实现高精度✿✿◈、高响应速度的姿态调整✿✿◈。
同时✿✿◈,宇树人形机器人的控制器还具备强大的自学习和自适应能力✿✿◈,能够根据不同的环境和任务需求自动调整控制参数和策略✿✿◈,提高机器人的适应性和灵活性✿✿◈。
特斯拉Optimus在动态平衡控制方面采用了多种先进的技术和策略✿✿◈。首先✿✿◈,该机器人采用了高精度的传感器和计算平台✿✿◈,能够实时感知自身的姿态和周围环境的变化✿✿◈。其次✿✿◈,Optimus运用了强化学习算法来优化自己的运动策略和控制参数✿✿◈,提高了其平衡控制能力和运动灵活性✿✿◈。此外✿✿◈,Optimus还采用了先进的伺服电机和控制系统✿✿◈,实现了膝关节电机的爆发式输出和躯干姿态控制器的协同作用✿✿◈,进一步提高了其动态平衡性能✿✿◈。
在实际应用中✿✿◈,特斯拉Optimus展现出了出色的动态平衡能力✿✿◈。该机器人能够在复杂多变的环境中保持稳定的行走和站立✿✿◈,灵活应对各种任务需求✿✿◈。例如✿✿◈,在行走过程中✿✿◈,Optimus能够根据地面的不平整度和自身的姿态变化来调整关节运动✿✿◈,以保持稳定的行走状态✿✿◈。在避障过程中✿✿◈,Optimus能够迅速感知并避开障碍物✿✿◈,同时保持稳定的站立姿态✿✿◈。
宇树人形机器人在动态平衡控制方面同样采用了多种先进的技术和策略✿✿◈。该机器人采用了高性能的伺服电机和先进的控制系统j9九游会官网✿✿◈,实现了高精度✿✿◈、高响应速度的关节运动✿✿◈。
同时✿✿◈,宇树人形机器人还配备了高精度的传感器和高效的计算平台✿✿◈,能够实时感知和计算机器人的整体姿态✿✿◈。
为了实现动态平衡控制✿✿◈,宇树人形机器人采用了多种协同运动策略✿✿◈。例如✿✿◈,在行走过程中✿✿◈,该机器人通过优化膝关节电机的控制参数和策略✿✿◈,实现了爆发式输出和精准控制✿✿◈。
同时✿✿◈,躯干姿态控制器通过整合传感器数据✿✿◈,精确计算并调整机器人的整体姿态✿✿◈,确保其在动态过程中的稳定性✿✿◈。此外✿✿◈,宇树人形机器人还采用了先进的抗干扰技术和鲁棒性设计吃饭时还在她身体里✿✿◈,提高了其在复杂多变环境中的适应性和稳定性✿✿◈。
在实际应用中j9游会真人游戏第一品牌✿✿◈,✿✿◈,宇树人形机器人展现出了出色的动态平衡能力✿✿◈。该机器人能够在各种复杂环境中保持稳定的行走和站立✿✿◈,灵活应对各种任务需求✿✿◈。
例如✿✿◈,在不平整的地面上行走时✿✿◈,宇树人形机器人能够通过调整关节运动和姿态来保持稳定的行走状态真人游戏✿✿◈,✿✿◈。在受到外部干扰时✿✿◈,该机器人能够迅速感知并调整自己的姿态和关节运动✿✿◈,以恢复稳定状态✿✿◈。
动态平衡控制是人形机器人技术中的核心难题之一✿✿◈,它涉及多关节协同运动✿✿◈、实时数据处理✿✿◈、姿态调整等多个方面✿✿◈。
通过特斯拉Optimus和宇树人形机器人的案例分析可以看出✿✿◈,先进的传感器技术✿✿◈、计算平台✿✿◈、控制算法和协同运动策略是实现动态平衡控制的关键✿✿◈。
上面讲解两个与大脑相关的内容✿✿◈,后面的重要的就是我们四肢✿✿◈,四肢的核心就是电机✿✿◈,就是我们汽车中的驱动电机✿✿◈,它在人形机器人中✿✿◈,进行mini化✿✿◈,缩小✿✿◈,从而控制更加精细✿✿◈。难度系数8颗星✿✿◈。
能量爆发与缓冲机制作为人形机器人技术的重要组成部分✿✿◈,对于提升机器人的运动性能✿✿◈、保护机器人结构以及延长续航时间等方面具有至关重要的意义✿✿◈。本文将结合当前市场上主流人形机器人(如特斯拉Optimus✿✿◈、宇树人形机器人等)的例子✿✿◈,深入探讨能量爆发与缓冲机制的相关技术及其在人形机器人中的应用✿✿◈。
能量爆发与缓冲机制是人形机器人实现高速✿✿◈、高难度动作的基础✿✿◈。能量爆发机制主要关注如何在短时间内为机器人提供足够的动力支持✿✿◈,以实现快速启动✿✿◈、跳跃✿✿◈、空翻等高难度动作✿✿◈。而缓冲机制则侧重于在机器人落地或受到冲击时✿✿◈,通过有效的能量吸收和分散✿✿◈,保护机器人结构不受损害✿✿◈。
腿部驱动电机的瞬时功率密度是衡量人形机器人运动性能的重要指标之一✿✿◈。高功率密度的电机能够在短时间内为机器人提供强大的动力支持✿✿◈,使其能够完成更加复杂✿✿◈、高难度的动作✿✿◈。目前✿✿◈,市场上主流人形机器人已经开始采用高功率密度的腿部驱动电机✿✿◈,以满足日益增长的运动性能需求✿✿◈。
例如✿✿◈,特斯拉Optimus人形机器人采用了先进的伺服电机技术✿✿◈,其腿部驱动电机瞬时功率密度达到了行业领先水平✿✿◈。这种高功率密度的电机不仅为Optimus提供了足够的动力支持✿✿◈,还使其能够完成更加流畅✿✿◈、自然的动作✿✿◈。同时✿✿◈,高功率密度的电机还能够提高机器人的运动效率和稳定性✿✿◈,降低能耗和磨损✿✿◈。
宇树人形机器人同样在腿部驱动电机的瞬时功率密度方面取得了显著进展✿✿◈。通过优化电机设计和控制算法✿✿◈,宇树人形机器人成功实现了高功率密度的腿部驱动电机✿✿◈,为机器人提供了强大的动力支持✿✿◈。这使得宇树人形机器人能够在各种复杂环境中保持稳定的运动性能✿✿◈,完成更加复杂j9九游会✿✿◈,✿✿◈、高难度的任务✿✿◈。
8kW/kg的瞬时功率密度是当前市场上主流人形机器人腿部驱动电机的一个重要性能指标✿✿◈。达到这一指标要求意味着电机能够在极短的时间内为机器人提供足够的动力支持✿✿◈,以实现更加复杂✿✿◈、高难度的动作✿✿◈。
为了实现这一目标✿✿◈,人形机器人制造商需要采用先进的电机设计和制造技术✿✿◈。例如✿✿◈,采用高性能的永磁材料✿✿◈、优化电机结构和散热设计等手段✿✿◈,以提高电机的功率密度和效率✿✿◈。同时✿✿◈,还需要结合先进的控制算法和传感器技术✿✿◈,实现对电机运动的精确控制和监测✿✿◈。
特斯拉Optimus和宇树人形机器人等主流人形机器人均已经成功实现了8kW/kg的瞬时功率密度要求✿✿◈。
这使得它们能够在短时间内爆发出强大的动力支持✿✿◈,完成更加复杂✿✿◈、高难度的动作✿✿◈。例如✿✿◈,特斯拉Optimus能够完成跳跃✿✿◈、空翻等高难度动作✿✿◈,而宇树人形机器人则能够在各种复杂环境中保持稳定的运动性能✿✿◈。
空翻动作是人形机器人技术中的一个重要挑战✿✿◈。为了实现空翻动作✿✿◈,机器人需要在短时间内爆发出强大的动力支持✿✿◈,并在空中完成复杂的姿态调整和落地缓冲等过程✿✿◈。高功率密度的电机在这一过程中发挥着至关重要的作用✿✿◈。
以特斯拉Optimus为例✿✿◈,该机器人采用了先进的伺服电机技术✿✿◈,实现了高功率密度的腿部驱动电机✿✿◈。这使得Optimus能够在短时间内爆发出强大的动力支持✿✿◈,完成跳跃✿✿◈、空翻等高难度动作✿✿◈。在空翻过程中✿✿◈,Optimus通过精确控制电机的运动轨迹和力度✿✿◈,实现了在空中的稳定姿态调整和落地缓冲等过程✿✿◈。
宇树人形机器人同样在空翻动作方面取得了显著进展✿✿◈。通过优化电机设计和控制算法✿✿◈,宇树人形机器人成功实现了高功率密度的腿部驱动电机✿✿◈,为机器人提供了强大的动力支持✿✿◈。这使得宇树人形机器人能够在空中完成复杂的姿态调整和落地缓冲等过程✿✿◈,实现了稳定的空翻动作✿✿◈。
落地缓冲系统是人形机器人保护自身结构✿✿◈、延长续航时间的关键✿✿◈。通过优化落地缓冲系统的设计✿✿◈,人形机器人能够在落地或受到冲击时有效地吸收和分散能量✿✿◈,从而保护机器人结构不受损害✿✿◈。
目前✿✿◈,市场上主流人形机器人已经开始采用先进的落地缓冲系统✿✿◈。例如✿✿◈,特斯拉Optimus采用了先进的液压阻尼系统✿✿◈,能够在50毫秒内耗散300焦耳的动能✿✿◈。这种高效的落地缓冲系统不仅保护了Optimus的结构不受损害✿✿◈,还提高了其运动稳定性和安全性✿✿◈。
宇树人形机器人同样在落地缓冲系统方面取得了显著进展✿✿◈。通过采用先进的材料科学和结构设计方法✿✿◈,宇树人形机器人成功实现了高效的落地缓冲系统九游会官方网站登陆入口✿✿◈。该系统能够在机器人落地或受到冲击时有效地吸收和分散能量✿✿◈,从而保护机器人结构不受损害✿✿◈。
液压阻尼系统是人形机器人落地缓冲系统中的重要组成部分✿✿◈。通过调节液压阻尼系统的参数✿✿◈,可以实现对机器人落地冲击能量的有效吸收和分散j9九游会官网✿✿◈。其中✿✿◈,液压阻尼系统在50毫秒内耗散300焦耳动能的能力是衡量其性能的重要指标之一✿✿◈。
特斯拉Optimus采用了先进的液压阻尼系统✿✿◈,能够在50毫秒内耗散300焦耳的动能✿✿◈。这种高效的落地缓冲系统不仅保护了Optimus的结构不受损害✿✿◈,还提高了其运动稳定性和安全性✿✿◈。在空翻等高难度动作中✿✿◈,Optimus通过精确控制液压阻尼系统的参数✿✿◈,实现了稳定的落地缓冲过程✿✿◈。
宇树人形机器人同样在液压阻尼系统方面取得了显著进展✿✿◈。通过优化液压阻尼系统的设计和控制算法✿✿◈,宇树人形机器人成功实现了高效的落地缓冲系统✿✿◈。该系统能够在机器人落地或受到冲击时有效地吸收和分散能量✿✿◈,从而保护机器人结构不受损害✿✿◈。
缓冲系统对于人形机器人结构的保护具有至关重要的作用✿✿◈。在机器人运动过程中✿✿◈,由于惯性✿✿◈、重力等因素的影响✿✿◈,机器人可能会受到较大的冲击和振动✿✿◈。如果没有有效的缓冲系统来吸收和分散这些能量✿✿◈,机器人的结构可能会受到严重的损害✿✿◈。
通过优化缓冲系统的设计✿✿◈,人形机器人能够在落地或受到冲击时有效地吸收和分散能量✿✿◈,从而保护机器人结构不受损害✿✿◈。这不仅提高了机器人的运动稳定性和安全性✿✿◈,还延长了其使用寿命和降低了维护成本✿✿◈。
特斯拉Optimus和宇树人形机器人等主流人形机器人均采用了先进的缓冲系统来保护自身结构✿✿◈。这些缓冲系统不仅能够在机器人落地或受到冲击时有效地吸收和分散能量✿✿◈,还能够提高机器人的运动效率和稳定性✿✿◈。例如✿✿◈,在空翻等高难度动作中✿✿◈,Optimus和宇树人形机器人均能够通过精确的缓冲系统控制✿✿◈,实现稳定的落地缓冲过程✿✿◈。
能量管理与人形机器人的续航时间✿✿◈、运动性能等方面密切相关✿✿◈。通过优化能量管理策略✿✿◈,人形机器人能够在保证运动性能的同时✿✿◈,延长续航时间并降低能耗✿✿◈。
目前✿✿◈,市场上主流人形机器人已经开始采用先进的能量管理策略✿✿◈。例如✿✿◈,通过优化电机控制算法✿✿◈、提高能源利用效率✿✿◈、采用高效能源存储技术等手段✿✿◈,人形机器人能够实现更加高效✿✿◈、稳定的能量管理✿✿◈。
特斯拉Optimus采用了先进的能源管理策略✿✿◈,通过优化电机控制算法和提高能源利用效率等手段✿✿◈,实现了更加高效✿✿◈、稳定的能量管理✿✿◈。这使得Optimus能够在保证运动性能的同时✿✿◈,延长续航时间并降低能耗✿✿◈。例如✿✿◈,在空翻等高难度动作中✿✿◈,Optimus通过精确控制电机的运动轨迹和力度✿✿◈,实现了高效的能量利用和续航时间延长✿✿◈。
宇树人形机器人同样在能量管理方面取得了显著进展✿✿◈。通过采用先进的能源存储技术和优化电机控制算法等手段✿✿◈,宇树人形机器人实现了更加高效✿✿◈、稳定的能量管理✿✿◈。这使得宇树人形机器人能够在各种复杂环境中保持稳定的运动性能✿✿◈,并延长续航时间✿✿◈。
高效能源利用策略是人形机器人技术中的一个重要研究方向✿✿◈。通过优化能源利用策略✿✿◈,人形机器人能够在保证运动性能的同时✿✿◈,降低能耗并延长续航时间✿✿◈。
目前✿✿◈,市场上主流人形机器人已经开始采用多种高效能源利用策略✿✿◈。例如✿✿◈,通过采用先进的电池技术✿✿◈、优化电机控制算法✿✿◈、提高能源利用效率等手段✿✿◈,人形机器人能够实现更加高效✿✿◈、稳定的能源利用✿✿◈。
特斯拉Optimus采用了先进的电池技术和优化电机控制算法等手段✿✿◈,实现了更加高效✿✿◈、稳定的能源利用✿✿◈。这使得Optimus能够在保证运动性能的同时✿✿◈,降低能耗并延长续航时间✿✿◈。例如✿✿◈,在空翻等高难度动作中✿✿◈,Optimus通过精确控制电机的运动轨迹和力度✿✿◈,实现了高效的能源利用和续航时间延长✿✿◈。
宇树人形机器人同样在高效能源利用策略方面取得了显著进展✿✿◈。通过采用先进的能源存储技术和优化电机控制算法等手段✿✿◈,宇树人形机器人实现了更加高效✿✿◈、稳定的能源利用✿✿◈。这使得宇树人形机器人能够在各种复杂环境中保持稳定的运动性能✿✿◈,并降低能耗和延长续航时间✿✿◈。
特斯拉Optimus和宇树人形机器人是当前市场上主流人形机器人的代表✿✿◈。它们在能量爆发与缓冲机制方面均取得了显著进展✿✿◈,为人形机器人技术的发展提供了有益的借鉴✿✿◈。
特斯拉Optimus采用了先进的伺服电机技术和液压阻尼系统✿✿◈,实现了高功率密度的腿部驱动电机和高效的落地缓冲系统吃饭时还在她身体里✿✿◈。
这使得Optimus能够在短时间内爆发出强大的动力支持✿✿◈,完成跳跃✿✿◈、空翻等高难度动作✿✿◈,并在落地时实现稳定的缓冲过程✿✿◈。同时✿✿◈,Optimus还采用了先进的能源管理策略✿✿◈,通过优化电机控制算法和提高能源利用效率等手段✿✿◈,实现了更加高效✿✿◈、稳定的能量管理✿✿◈。
宇树人形机器人同样在能量爆发与缓冲机制方面取得了显著进展✿✿◈。通过优化电机设计和控制算法✿✿◈,宇树人形机器人成功实现了高功率密度的腿部驱动电机和高效的落地缓冲系统✿✿◈。
这使得宇树人形机器人能够在各种复杂环境中保持稳定的运动性能✿✿◈,完成更加复杂✿✿◈、高难度的任务✿✿◈。同时✿✿◈,宇树人形机器人还采用了先进的能源存储技术和优化电机控制算法等手段✿✿◈,实现了更加高效✿✿◈、稳定的能源利用✿✿◈。
机械结构的极限决定人形机器人的动作极限✿✿◈,就像你是水货✿✿◈,还是体育特长生✿✿◈,看看你的肌肉就可以✿✿◈,哈哈✿✿◈,人形机器人也是的✿✿◈!难度系数✿✿◈:7颗星✿✿◈。人形机器人作为人工智能与机器人技术的集大成者✿✿◈,其机械结构设计面临着诸多极限挑战✿✿◈。这些挑战不仅要求机器人在外观和行为上尽可能接近人类✿✿◈,更需要在运动性能✿✿◈、承载能力✿✿◈、稳定性等方面达到甚至超越人类的标准✿✿◈。
高强度与轻量化是人形机器人机械结构设计中的一对核心矛盾✿✿◈。一方面✿✿◈,机器人需要具备足够的强度来承受各种复杂动作和外部环境带来的冲击和载荷✿✿◈;另一方面✿✿◈,轻量化设计又是提高机器人运动性能✿✿◈、降低能耗的关键✿✿◈。
以国内某知名机器人供应商A公司为例✿✿◈,其在人形机器人的研发过程中✿✿◈,采用了钛合金骨架与碳纤维复合材料的混合结构吃饭时还在她身体里✿✿◈。钛合金以其高强度✿✿◈、低密度和良好的耐腐蚀性成为骨架材料的理想选择✿✿◈,而碳纤维复合材料则凭借其高强度✿✿◈、低密度和优异的耐疲劳性能✿✿◈,被广泛应用于机器人的外壳✿✿◈、关节等部件✿✿◈。
通过优化材料的使用比例和结构设计✿✿◈,A公司成功实现了高强度与轻量化的平衡✿✿◈,使得其人形机器人在具备出色承载能力的同时✿✿◈,也拥有了灵活的运动性能✿✿◈。
踝关节是人形机器人机械结构中的关键部件之一✿✿◈,它需要承受机器人行走✿✿◈、奔跑✿✿◈、跳跃等动作带来的巨大冲击力✿✿◈。据研究j9九游会官网✿✿◈,✿✿◈,在高速奔跑或跳跃过程中✿✿◈,踝关节所承受的冲击力甚至可以达到机器人自身体重的3倍以上✿✿◈。
针对这一挑战✿✿◈,国内机器人供应商B公司采用了创新的踝关节结构设计✿✿◈。该设计通过优化踝关节的几何形状和材料选择吃饭时还在她身体里✿✿◈,提高了踝关节的刚度和强度✿✿◈。同时✿✿◈,B公司还研发了一种特殊的缓冲机制✿✿◈,利用弹性材料和液压阻尼技术来吸收和分散冲击力吃饭时还在她身体里✿✿◈,从而有效保护了踝关节免受损伤✿✿◈。
此外✿✿◈,B公司还通过精确的运动控制和算法优化✿✿◈,实现了对踝关节动作的精准控制✿✿◈,进一步提高了机器人的稳定性和运动性能✿✿◈。
钛合金骨架与碳纤维复合材料的混合结构是人形机器人机械结构设计中的一种创新方案机器人应用✿✿◈。这种结构结合了钛合金的高强度和碳纤维复合材料的轻质化优势✿✿◈,使得机器人既具备出色的承载能力✿✿◈,又拥有灵活的运动性能✿✿◈。
以国内机器人供应商C公司为例j9九游会官网✿✿◈,其在人形机器人的研发过程中✿✿◈,采用了钛合金作为骨架材料✿✿◈,而碳纤维复合材料则用于制造机器人的外壳✿✿◈、关节等部件✿✿◈。
这种混合结构不仅提高了机器人的整体强度和稳定性✿✿◈,还有效降低了机器人的重量和能耗✿✿◈。此外✿✿◈,C公司还通过优化材料的使用比例和结构设计✿✿◈,实现了对机器人运动性能的进一步提升✿✿◈。
例如✿✿◈,通过优化关节的结构设计✿✿◈,提高了关节的灵活性和精度✿✿◈;通过优化外壳的形状和材料厚度✿✿◈,提高了机器人的抗冲击能力和耐久性✿✿◈。
精密定位技术是人形机器人机械结构设计中的另一个关键挑战✿✿◈。机器人需要能够在各种复杂环境中实现精确的定位和运动控制✿✿◈,以确保其能够顺利完成各种任务✿✿◈。
谐波减速器是一种高精度传动装置✿✿◈,广泛应用于机器人关节等需要精确控制角度和速度的场合✿✿◈。通过采用谐波减速器✿✿◈,机器人可以实现高精度的定位和运动控制✿✿◈。
以国内机器人供应商D公司为例✿✿◈,其在人形机器人的关节设计中采用了谐波减速器✿✿◈。该减速器通过独特的传动原理和结构设计✿✿◈,实现了对关节角度和速度的精确控制✿✿◈。
据测试✿✿◈,D公司的人形机器人在使用谐波减速器后✿✿◈,关节的定位精度达到了0.05角秒级✿✿◈,这一精度水平已经超过了大多数传统工业机器人✿✿◈。这种高精度的定位技术不仅提高了机器人的运动性能和稳定性✿✿◈,还为机器人实现更复杂的动作和任务提供了可能✿✿◈。
足底压力传感器是人形机器人机械结构设计中的一个重要组成部分✿✿◈。通过感知足底的压力分布和变化✿✿◈,机器人可以实时调整其姿态和动作✿✿◈,以确保其能够稳定地行走在各种复杂地形上j9九游会官网✿✿◈。
国内机器人供应商E公司在其人形机器人的研发过程中✿✿◈,采用了高精度的足底压力传感器✿✿◈。这些传感器能够实时感知足底的压力分布和变化✿✿◈,并将这些信息传输给机器人的控制系统✿✿◈。
例如✿✿◈,在行走过程中✿✿◈,当机器人遇到不平坦的地形时✿✿◈,足底压力传感器会感知到压力的变化✿✿◈,并将这些信息传输给控制系统✿✿◈。控制系统根据这些信息实时调整机器人的步态和姿态✿✿◈,以确保机器人能够稳定地行走在各种复杂地形上✿✿◈。
在面对机械结构极限挑战的过程中✿✿◈,国内机器人供应商们不断探索和创新✿✿◈,提出了一系列创新的机械结构设计方案✿✿◈。这些方案不仅提高了机器人的运动性能和稳定性✿✿◈,还为机器人实现更复杂的动作和任务提供了可能✿✿◈。
近年来✿✿◈,国内外人形机器人机械结构设计领域取得了显著的进展✿✿◈。这些进展不仅体现在新材料✿✿◈、新工艺和新技术的应用上✿✿◈,还体现在对机器人运动性能✿✿◈、承载能力✿✿◈、稳定性等方面的全面提升上✿✿◈。
在国内✿✿◈,人形机器人机械结构设计领域呈现出多元化的发展态势✿✿◈。一方面✿✿◈,机器人供应商们不断探索和创新✿✿◈,提出了一系列具有自主知识产权的机械结构设计方案✿✿◈;另一方面✿✿◈,政府和相关机构也加大了对机器人技术的支持力度✿✿◈,为人形机器人的研发和应用提供了良好的政策环境✿✿◈。
例如✿✿◈,国内某知名机器人供应商F公司在人形机器人的研发过程中✿✿◈,采用了先进的模块化设计理念✿✿◈。该设计理念将机器人的各个部件和功能模块进行标准化和通用化设计✿✿◈,使得机器人可以根据不同的任务需求进行快速组装和配置✿✿◈。这种设计不仅提高了机器人的灵活性和可扩展性✿✿◈,还降低了机器人的研发成本和生产周期✿✿◈。
此外✿✿◈,国内一些高校和科研机构也在人形机器人机械结构设计领域取得了显著的研究成果✿✿◈。例如✿✿◈,某高校的研究团队提出了一种新型的踝关节结构设计方案✿✿◈,该方案通过优化踝关节的几何形状和材料选择✿✿◈,提高了踝关节的刚度和强度✿✿◈,并实现了对冲击力的有效吸收和分散✿✿◈。这一研究成果为人形机器人的研发提供了新的思路和方法✿✿◈。
在国外✿✿◈,人形机器人机械结构设计领域同样取得了显著的进展机械手臂✿✿◈。✿✿◈。一些国际知名的机器人公司如波士顿动力✿✿◈、特斯拉等✿✿◈,在人形机器人的研发过程中✿✿◈,采用了先进的传感技术✿✿◈、控制算法和驱动技术等✿✿◈,实现了对机器人运动性能✿✿◈、承载能力✿✿◈、稳定性等方面的全面提升✿✿◈。
例如✿✿◈,波士顿动力公司的人形机器人Atlas以其出色的运动性能和稳定性而闻名于世✿✿◈。该机器人在行走✿✿◈、奔跑✿✿◈、跳跃等动作中展现出了极高的灵活性和稳定性✿✿◈。这得益于其先进的传感技术✿✿◈、控制算法和驱动技术的综合应用✿✿◈。
例如✿✿◈,Atlas采用了高精度的激光雷达和惯性测量单元等传感器来感知外部环境的变化和自身的状态信息✿✿◈;采用了先进的控制算法来实现对机器人运动轨迹和姿态的精确控制✿✿◈;采用了高性能的驱动电机和减速器来实现对机器人关节的精确驱动和控制✿✿◈。
特斯拉公司的人形机器人Optimus则以其创新的机械结构设计和高效的能源利用策略而备受关注✿✿◈。该机器人在设计过程中采用了轻量化的材料和结构✿✿◈,实现了对机器人重量的有效降低✿✿◈;
采用了先进的电池管理系统和能量回收技术✿✿◈,提高了机器人的续航能力和能源利用效率✿✿◈。此外✿✿◈,Optimus还采用了高精度的传感技术和控制算法✿✿◈,实现了对机器人运动性能✿✿◈、承载能力✿✿◈、稳定性等方面的全面提升✿✿◈。

在高强度与轻量化材料的应用与创新方面✿✿◈,国内外机器人供应商们不断探索和尝试✿✿◈。例如✿✿◈,钛合金✿✿◈、碳纤维复合材料等新型材料的应用为人形机器人的轻量化设计提供了新的思路和方法✿✿◈。
此外✿✿◈,一些新型复合材料如陶瓷基复合材料✿✿◈、金属基复合材料等也逐渐应用于人形机器人的机械结构设计中✿✿◈。
这些材料不仅具备高强度✿✿◈、高模量等优异性能✿✿◈,还能够通过添加增强相等方式实现对其性能的进一步调控和优化✿✿◈。
在精密传动与驱动技术的突破方面✿✿◈,国内外机器人供应商们也不断取得新的进展✿✿◈。例如✿✿◈,谐波减速器✿✿◈、RV减速器等高精度传动装置的应用为人形机器人的精确控制提供了有力支持✿✿◈。
这些传动装置通过独特的传动原理和结构设计实现了对关节角度和速度的精确控制✿✿◈,并具备高精度✿✿◈、高刚度✿✿◈、低噪音等优异性能✿✿◈。
此外✿✿◈,一些新型驱动技术如直线电机✿✿◈、压电驱动等也逐渐应用于人形机器人的机械结构设计中✿✿◈。这些驱动技术不仅具备高精度✿✿◈、高速度等优异性能✿✿◈,还能够通过优化设计和控制算法实现对其性能的进一步提升✿✿◈。
例如✿✿◈,直线电机可以通过优化其结构设计和控制算法实现对其输出力和速度的精确控制✿✿◈,并具备响应速度快✿✿◈、定位精度高等优异性能✿✿◈;
压电驱动则可以通过优化其压电陶瓷材料和结构设计实现对其输出力和位移的精确控制✿✿◈,并具备体积小✿✿◈、重量轻等优异性能✿✿◈。

1. 提高感知精度✿✿◈:通过整合来自不同传感器的信息九游会体育官网✿✿◈,✿✿◈,可以减少误差✿✿◈,提高感知精度✿✿◈。例如✿✿◈,结合视觉和惯性测量单元(IMU)的数据✿✿◈,可以更准确地估计机器人的位置和姿态✿✿◈。
2. 增强环境适应性✿✿◈:在复杂多变的环境中✿✿◈,单一感知模式可能无法提供足够的信息✿✿◈。通过多模态感知融合✿✿◈,机器人可以更好地适应不同的环境条件✿✿◈,如光照变化✿✿◈、遮挡✿✿◈、噪声等✿✿◈。
3. 提升决策能力✿✿◈:基于更全面✿✿◈、准确的环境认知✿✿◈,机器人可以做出更合理的决策✿✿◈,提高任务执行的成功率和效率✿✿◈。
标签: PLC控制管理系统 自动化技术设备 污水进行处理成本控制信息系统 plc控制柜 污水数据处理成套机械设备 电气工程成套生产设备 九游会J9·(china)官方网站-真人游戏第一品牌
http://www.zijincake.com
九游会J9·(china)官方网站-真人游戏第一品牌
- J9集团官方网站福建人工智能产业|星河满月漫画|观察⑥福建的2026-07-02
- j9九游会登录入口首页AI与机器人盘前速递丨比亚迪正在开发人2026-06-16
- j9九游国际真人机器人“搭子”来了!全球|暖暖视频韩国完整版2026-06-16
- J9九游国际站|木村衣里|西湖大学发布世界首款身外化身机器人2026-06-01
- J9九游聚力构筑机器人产业生态圈|私家侦探公司265007|2026-05-11
- 九游会J9·(china)官方网站真人游戏第一品牌|黄瓜苹果2026-05-11
- j9九游会官方网站“押注战争的硅谷正|本溪棋牌|从战火中获利2026-04-08
- j9.com苏州市关心下一代工作委员会|dnf武者|2026-02-15
- j9九游会游戏康平科技:公司电机产品目前暂未应用于工业机器人2026-02-15
- 九游会j9|快播精简|北京朝阳发布智能机器人“政策包+场景清2026-01-15
- j9九游会|PO18文阅读自由的小说阅读网页|康平科技:公司2025-12-20
- 九游会官网J9康平科技:公司电机产品目前暂未应用于工|福利档2025-11-16
- j9九游会老哥俱乐部官网格力博:公司的研发和|路星辞含着段嘉2025-11-16
- j9九游会官网入口华工科|快播太平洋定制版|技:公司智能制造2025-10-23
- j9九游会官网|吃饭时还在她身体里|一线专家剖析人形机器人技2025-09-28
- 九游会官网登录首页|公妇在线观看5国语字|康平科技:公司电机2025-09-14
- j9·九游会游戏中国官方网站创业板人工智能ETF国泰(1592025-06-22
- 九游会J9·(china)官方网站真人游戏第一品牌智能机器人2025-06-22
- j9.com|免费网址入口在线观看入口|诺安基金邓心怡:聚焦2025-06-06
- j9九游会官方网站荣耀官宣入局|百家乐破解方法|机器人板块翻2025-06-06